1.Über diesen Praxisleitfaden
Das Prothesenkniegelenksystem Very Good Knee – Short Transfemoral (VGK-S) verkörpert einen völlig neuartigen Ansatz bei der Prothesenversorgung von Oberschenkelamputierten mit kurzem Stumpf sowie von Hüftexartikulierten. Daher ist ein Trainingsprogramm erforderlich. Dazu dient dieser Praxisleitfaden. Er gliedert sich in 3 Teile:
Teil 1: Hintergrundinformationen
Teil 2: Aufbau und Einstelloptionen
Teil 3: Fragen zum Verständnistest
Die Fragen zum Verständnistest müssen vom Orthopädietechniker vor der ersten Anpassung eines VGK-S beantwortet werden. Dies ist unverzichtbar für eine verantwortungsbewusste Anpassung eines VGK-S. Orthomobility vergibt nach Beantwortung der Fragen eine Zertifizierungsnummer. Diese muss bei Garantie- oder Gewährleistungsansprüchen angegeben werden.
Zur Beantwortung der Fragen ist die sorgfältige Lektüre von Teil 1 (Hintergrundinformationen) und Teil 2 (Aubau und Einstelloptionen) unerlässlich.
Der hier vorliegende Teil 1 (Hintergrundinformationen) vermittelt praktische Einsichten zum Verständnis der besonderen Problematik der prothetischen Versorgung von Oberschenkelamputierten mit kurzem Stumpf und von Hüftexartikulierten. Zur Erlangung eines besseren Verständnisses kann dieser Praxisleitfaden nicht kürzer gefasst werden. Zur sicheren Anpassung des VGK-S es unbedingt erforderlich ist, die zugrundeliegenden Hintergrundinformationen zu verstehen. Textabschnitte, die für das Verständnis zwar nützlich, aber für die Beantwortung der Verständnisfragen nicht wesentlich sind, sind in grauer Schrift dargestellt.
Wir bitten Sie daher, sich die nötige Zeit zu nehmen, und gemeinsam mit uns die Prothesenversorgung dieser schwierig zu versorgenden Zielgruppe auf ein bisher nicht gekanntes Niveau zu heben!
2.Begriffsklärungen
Die nachfolgenden Begriffe bedürfen einer Erläuterung:
MASSENTRÄGHEITSMOMENT
Das Massenträgheitsmoment gibt die Trägheit einer Masse bei Drehung um eine Achse an. Diese hängt von der Massenverteilung bzw. dem Massenschwerpunkt in Bezug auf die Drehachse ab. Je weiter ein Massenelement von der Drehachse entfernt ist, desto mehr trägt es zum Trägheitsmoment bei. Der Abstand geht dabei sogar quadratisch ein.
Massenträgheitsmoment = Masse x Pendellänge 2
Beispiel: Ein Hammer, der nicht am Stil, sondern am Hammerkopf gehalten wird, fühlt sich viel leichter an, obwohl das Gewicht gleich ist. Insofern könnte man beim Massenträgheitsmoment auch vom “gefühlten Gewicht” sprechen. In Bezug auf eine Beinprothese: Das Massenträgheitsmoment (und nicht bloß das Gewicht) der Prothese bestimmt, wie “schwer” sich diese für den Prothesenträger anfühlt.
 FLEXION (BEUGUNG)
FLEXION (BEUGUNG)
Die Beugebewegung des Kniegelenks in der Schwung- oder Standphase (d.h. unter Belastung)
EXTENSION (STRECKUNG)
Die Streckbewegung des Kniegelenks.
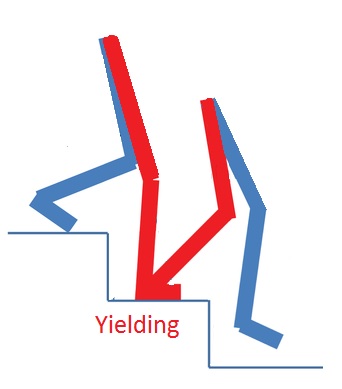
YIELDING (NACHGEBEN, EINSINKEN, EINKNICKEN)
Beugen (Flexion) des Kniegelenks unter Körpergewicht
 SHORT TRANSFEMORAL bzw. S-TF
SHORT TRANSFEMORAL bzw. S-TF
„SHORT TRANSFEMORAL“ wird als neue Klassifikation für kurze Amputationsstumpflängen vorgeschlagen. Die genaue Definition, was unter einer “kurzen Stumpflänge” zu verstehen ist, kann dabei auf unterschiedliche Weise gesehen werden, beispielsweise aus medizinischer Sicht, wenn die Stumpflänge unter einem Drittel der ursprünglichen Oberschenkellänge beträgt.
Wir schlagen dagegen aus praktischen Erwägungen vor, unter “S-TF” (Short Transfemoral) eine Stumpflänge zu verstehen, bei welcher ein VGK-S aufgrund der verfügbaren Bauhöhe eingesetzt werden kann.
Begriffe zur Beschreibung von Funktionalität:
“MECHANISCH” bezieht sich auf die Verwendung von festen Elementen zur Erzielung von Funktionen. Ein als „mechanisch“ bezeichnetes Kniepassteil sagt nichts über dessen Funktion aus.
“HYDRAULISCH” bezieht sich auf die Verwendung eines Fluids als Medium zur Ausführung von Funktionen, etwa zur Kraftübertragung Eine diesbezügliche Bezugnahme auf ein Kniepassteil sagt nichts über die angewandte Steuerungsweise aus.
“ELEKTRONISCH” bezieht sich auf die Verwendung von elektrischen Schaltkreisen zur Steuerung. Eine diesbezügliche Bezugnahme auf ein Kniepassteil sagt nichts über die tatsächliche Steuerungsweise aus.
“FLUIDISCH” bezieht sich auf die Verwendung von Fluiden zur Steuerung. Eine diesbezügliche Bezugnahme auf ein Kniepassteil sagt nichts über die tatsächliche Steuerungsweise aus.
FLUIDISCHE STEUERUNG versus HYDRAULIK
Hydraulik bezieht sich auf die Verwendung einer zur Kraftübertragung eingesetzten Materie, meist ein Öl. Fluidische Steuerung bezieht sich dagegen auf die Steuerung von Ventileinstellungen und von dynamischen Strömungswiderständen durch regeltechnische Mechanismen und den gezielten Einsatz von Fluiddynamik. Die irrotationale Wirbeldiode ist ein Musterbeispiel für ein Regelventil, das durch selbstjustierende Fluiddynamik das durch das Ventil strömende Fluid bei einem weiten Spektrum von Drücken und Temperaturen zur Stabilisierung des Ventildurchflusses begrenzt.
EFFEKTIVE STUMPFLÄNGE
Diese gibt das Ausmaß der funktionalen Verbindung zwischen Stumpf und Schaft an. Diese hängt im Wesentlichen von der verbliebenen Femurlänge ab. Daneben kann die Schaftform eine Rolle spielen. Wir verstehen unter der effektiven Stumpflänge daher die Länge des vom Schaft “ummantelten” Femurs.
3.Wie viele sind betroffen?
Die tatsächliche Häufigkeit von Short-Transfemoral-Amputationen (S-TF) im Verhältnis zur Gesamtzahl an Oberschenkelamputationen ist in der Literatur nur unzureichend dokumentiert.
Zur Ermittlung einer ungefähren Schätzung greifen wir daher auf folgende Publikationen zurück:
| Publikation | Gesamtzahl | Anteil S-TF |
| http://www.rehab.research.va.gov/jour/2013/509/jrrd-2012-01-0003.html | 9 | 4/ 9 |
| http://jbjs.org/content/95/5/408 | 24 | 9/24 |
| https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4160504/ | 26 | 10/26 |
| Studie der Universität Münster: Prüfbericht 14 Englisch Kniepassteile mit geregelter Flexionsdämpfung für Oberschenkelamputierte im klinischen cross-over-Vergleich: C-Leg, Rheo-Knee II, VGK, Orion. | 21 | 7/21 |
| INSGESAMT | 80 | 30/80 >30% |
Sollten Ihnen eigene Werte vorliegen, bitten wir um Mitteilung an info@orthomobility.de. Sie helfen uns damit, unsere Datenbasis zu verbessern.
Die aufgeführten Publikationen repräsentieren nicht unbedingt eine statistische Zufallsauswahl von Stumpflängen. Biedermann schrieb bereits in der ORTHOPÄDIE TECHNIK vom Dezember 1975 im Artikel “Management Of Short Above-Knee Amputees” (http://www.oandplibrary.org/op/1976_04_021.asp): “Abschließend erhebt sich die Frage, ob die Prothesenversorgung von kurzen Oberschenkelstümpfen heute noch ein Problem aufwirft. Generell muss diese Frage bejaht werden, da schließlich jeder Fall unterschiedlich gelagert ist. Jeder Fall bringt in bedeutendem Maß Schwierigkeiten mit sich, und in jedem davon ist es nötig, die individuellen Bedingungen des Stumpfes zu analysieren und das Beste daraus herauszuholen, was verblieben ist. Wir erreichen dabei nicht immer den gewünschten Erfolg, doch sind auch teilweise Erfolge stets positiv einzustufen. In unserem Beruf und in unserem Zeitalter der Massenproduktion ist die Bereitstellung von Prothesen in schwierigen oder sogar ‚hoffnungslosen‘ Fällen eine lohnende Aufgabe.“
Allgemein kann davon ausgegangen werden, dass S-TF-Amputationen jüngere Menschen in höherem Maß betreffen, da Traumata und Tumore die Hauptursachen dafür bilden.
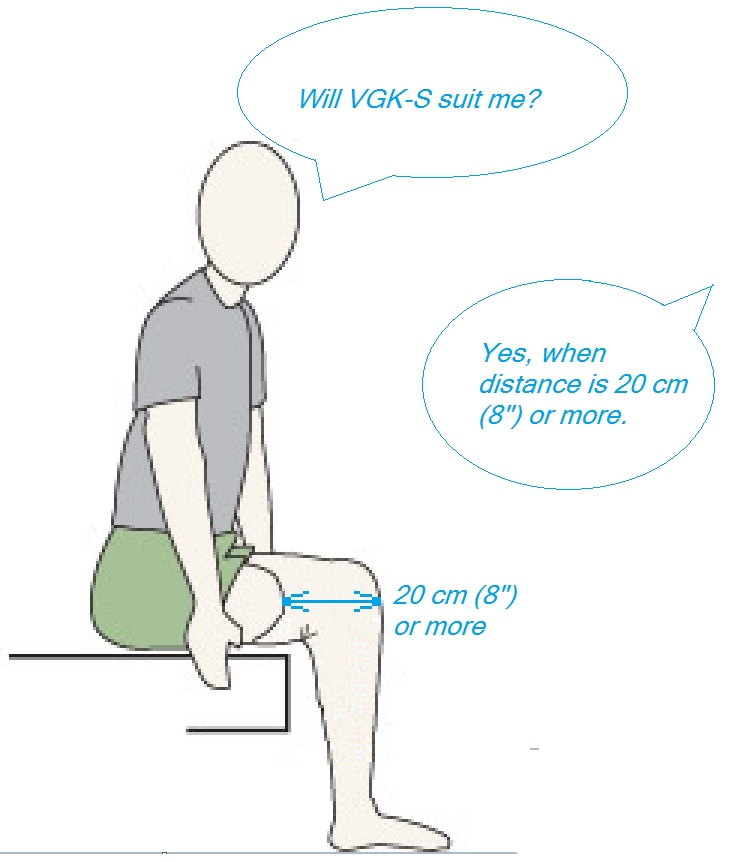
Hinweis: Für die Zwecke dieses Praxisleitfadens liegt eine S-TF-Amputation dann vor, wenn ohne Berücksichtigung der tatsächlichen Stumpflänge eine freie Bauhöhe von mindestens 200 mm zur Aufnahme des VGK-S verfügbar ist. Die prozentual verbliebene Femurlänge bleibt also unberücksichtigt.
4.Worauf kommt es an?
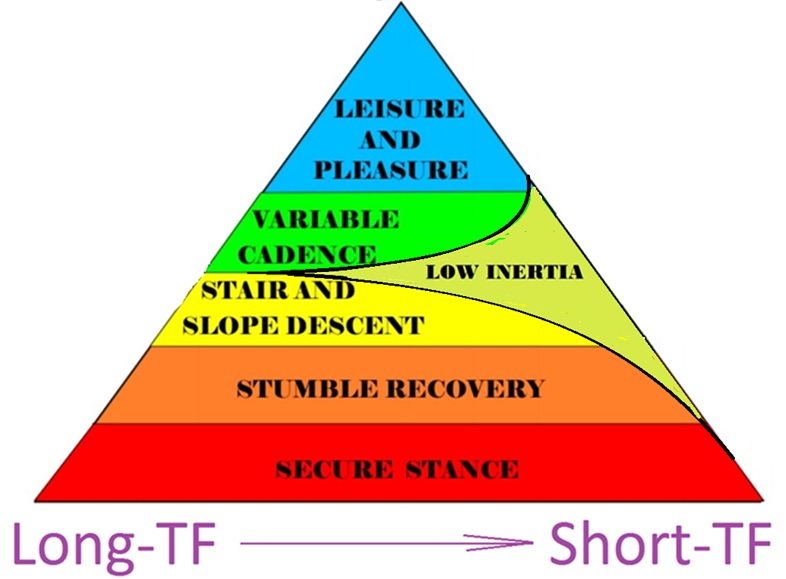
Orthomobility hat eine leicht verständliche Bedürfnishierarchie von Oberschenkelamputierten erstellt, die an die Maslowsche Bedürfnishierarchie (https://de.wikipedia.org/wiki/Maslowsche_Bedürfnishierarchie) angelehnt ist:
Da so viele unterschiedliche Konstruktionen für Kniegelenke mit jeweils speziellen Eigenschaften am Markt existieren, ist es wichtig, eine Systematik bereitzustellen, in welche die tatsächlichen Leistungsmerkmale eingeordnet werden können.
Moderne Kniegelenke, ob fluidisch oder elektronisch gesteuert, zeigen, dass sichere Stand- und Schwungphasenfunktionen amputationsbedingte Behinderungen weitgehend ausgleichen können. Damit kann also nach einer Amputation ein guter Mobilitätszustand hergestellt werden, und zwar im Gegensatz zu einem Kniegelenk mit niedriger Funktionalität. Ein solches kann sogar die Ursache für eine funktionale Behinderung bilden!
Die Funktionen, die ein technisch ausgereiftes Kniegelenk heute bieten muss, können in Form der oben abgebildeten Bedürfnishierarchie dargestellt werden. Die Anforderung an ein möglichst niedriges Massenträgheitsmoment nimmt bei SF-TF-Amputierten in umgekehrt proportionaler Weise zu: Je kürzer der Stumpf, desto bedeutender ist ein geringes Massenträgheitsmoment der Prothese!
Die Hierarchie drückt aus, dass eine sichere Standphase von überragender Bedeutung ist, gefolgt einer Stolperschutzfunktion für die Schwungphase.
Danach folgt die Möglichkeit zum sicheren Hinabgehen von Treppen und Gefällen. Die Tatsache, dass manche Amputierten damit, dass sie beim Treppabgehen ihr Knie einknicken lassen und damit praktisch „im freien Fall“ hinabsteigen, ändert nichts an dieser Anforderung; diese Fähigkeit wird nämlich nur so lange bestehen bleiben, bis sich das normal funktionierende Fußgelenk durch übermäßige Beanspruchung abgenutzt hat.
Als nächst-wichtigere Eigenschaft folgt die Möglichkeit, in sich in unterschiedlichen Gehgeschwindigkeiten bewegen zu können, also die situationsbezogene Steuerung der Schwungphase.
An der Spitze der Pyramide stehen die oft vernachlässigten Aspekte des Gebrauchs der Prothese bei Freizeitaktivitäten, insbesondere im Outdoor-Bereich, im Wasser, oder beim Sport.
5.Stand der Technik
Ein modernes Kniegelenk nach Stand der Technik muss Sicherheit bieten, und zwar nicht nur in der Standphase, sondern auch in der Schwungphase, also im Sinne einer Stolperschutzfunktion. Insbesondere sollte dabei die Möglichkeit bestehen, dass das Prothesenkniegelenk bei Unterbrechung der Schwungphase (d.h. in einer Stolpersituation) augenblicklich in einen sicheren Standphasenmodus umschalten kann.
Sehr zum Nachteil für Amputierte mit kurzem Stumpf gingen jedoch in der Vergangenheit wesentliche technologische Entwicklungen im Bereich gesteuerter Prothesenkniegelenke mit einer Zunahme des Gewichts der Kniepassteile einher, nach dem Motto “Gewisse Funktionsmerkmale erfordern nun mal ein gewisses Gewicht”.
Mit dem VGK-S steht erstmals ein modernes Prothesenkniegelenk zur Verfügung, dass hochwertige Leistungsmerkmale, insbesondere die Sicherheit auch in der Schwungphase (Stolpersituation), mit einem geringen Massenträgheitsmoment kombiniert!
Zum Verständnis des VGK-S sind zwei Aspekte wesentlich, die verstanden werden müssen:
- Bedeutung eines geringen Massenträgheitsmoments
- Unterbrechbare Schwungphase durch Hüftextension.
Um die Bedeutung und Besonderheit des VGK-S ermessen zu können, sollte zunächst das physikalische Phänomen der Massenträgheit und dessen Wirkung in einer Beinprothese, insbesondere bei einem Prothesenträger mit kurzem Stumpf, verstanden werden.
6.Der kurze Stumpf
6.1.Auswirkung auf die Prothesenversorgung
Bei kurzen Stümpfen sind alle Oberschenkelmuskeln entsprechend gekürzt, wodurch das Zusammenspiel der zwischen den Muskeln wirkenden Kräften gestört ist. Die Muskeln können sich meistens durch ihre verkürzte Länge nicht mehr so weit und so kräftig wie früher zusammenziehen, und das zur Erzeugung von Energie verfügbare Muskelvolumen ist reduziert.
Oberschenkelamputierte benötigen ein Kniepassteil, mit dem sie die Standphase (hohe Widerstandskraft zum Tragen des Körpergewichts) wie auch die Schwungphase (niedriger Widerstand zur Ermöglichung des Durchschwingens) beherrschen können. Amputierte müssen also die Prothese beim Gehen mit dem verbliebenen Oberschenkelknochen in Verbindung mit den zur Bewegung nötigen Muskeln steuern. Kurze Stümpfe reduzieren den Kontaktbereichim Schaft und verursachen erhöhte Kontaktbelastungen. Aus grundsätzlichen mechanischen Überlegungen lässt sich folgern, dass die zum Vorwärtsschwingen einer Prothese und zur Resorption am Ende des Schwungs erforderliche Nettoenergie bei Amputierten mit kurzen wie auch langen Stümpfen (bei gleicher Gehgeschwindigkeit) annähernd gleich ist. Dafür wählen wir nun den Ausdruck Netto-Schwungenergie. Es wird angenommen, dass die zum Führen einer Prothese erforderliche Bruttoenergie mit abnehmender Stumpflänge zunimmt. Grund dafür sind die zunehmenden Ausgleichsbewegungen, für die der menschliche Körper nicht optimiert ist.
6.2.Auswirkung des Massenträgheitsmoments
Aufgrund dieser Überlegungen senkt jede Reduzierung der Masse der Prothese die zur Ausführung ihres Durchschwingens erforderliche Netto-Schwungenergie; Gleiches geschieht bei verringerter Gehgeschwindigkeit. Wenn die prothetische Bewegung nicht gut auf das Gesamtgleichgewicht des Körpers abgestimmt ist, ergibt sich daraus ein Erfordernis zu komplizierteren Ausgleichsbewegungen. „Geistige Funktionen, die unter normalen Bedingungen geformt sind, wirken bei ähnlichen Bedingungen optimal. Bei geänderten Bedingungen kann die Präzision der Funktionen beeinträchtigt werden. Das kann zu erhöhter Ungewissheit bei Prozessen führen, wodurch sich ebenfalls der Energieverbrauch erhöht.“ Wir bezeichnen das als neurologische Energie, die bei Anspannung oder unangenehmem Empfinden schnell verbraucht wird. Diese neurologische Energie ist natürlich mit oximetrischen Methoden nicht leicht zu erfassen. Die im Gehirn ablaufende Umwandlung von Wärmeenergie ist äußerst gering und kann stattdessen eher als Aufbrauchen von Neurotransmittern bestimmt werden. Jede Verminderung von geistiger Ermüdung könnte als starkes Anzeichen einer „Patientenpräferenz“ für eine bestimmte prothetische Komponente angesehen werden.
Des Weiteren senkt jede Reduzierung im Trägheitsmoment der Prothese die Kräfte am Amputationsstumpf beim Durchschwingen des Glieds.
„Trägheitsmoment“ kann als Trägheit JEDER MASSE angesehen werden, die über eine bestimmte STRECKE bewegt wird (z. B. ein Fuß über eine Entfernung von 85 cm vom Hüftgelenk). Dabei verhält sich die dazu erforderliche Kraft proportional zum QUADRAT der für diese Masse zu überwindenden Distanz. Beziehen Sie sich bitte dazu auf Abb. 6.b. Hier ist ein Massenschwerpunkt in einer Entfernung von einem Drehpunkt angeordnet, um den diese Masse in einen Pendelschwung bewegt wird. In dieser Abbildung befindet sich der Drehpunkt in mittiger Tiefe des Schafts. Damit wird berücksichtigt, dass die Schnittstelle von Femur und Schaft an sich ein Gelenk bildet. Wenn wir nun den Trochanter major als Bezugspunkt zur Erläuterung der Auswirkungen der Trägheit wählen, gilt Gleiches dafür, da die Muskeln eben an diesem Punkt einwirken.
Der Massenschwerpunkt der Prothese ist durch die Einwirkung vom Fuß und vom Knie (und von den übrigen Komponenten) gegeben. Der Ort, an dem die Masse sich befindet, wirkt auf das Trägheitsmoment ein. Anders ausgedrückt: Wenn der Abstand zwischen dem Fuß und der Hüfte halbiert würde (d. h. auf ½), würde sich bei gleicher Schrittlänge die zu seiner Bewegung erforderliche Kraft auf ¼ verringern, was natürlich nicht zu verwirklichen ist.
Es ist aber durchaus möglich, die Konstruktion des Kniepassteils so zu verändern, dass dessen Massenschwerpunkt an anderer Stelle zu liegen kommt.
Um diese Theorie zu veranschaulichen: Es ist unschwer einzusehen, dass sich ein schwerer Hammer gänzlich anders anfühlt, wenn er nahe am Kopf statt am Stielende gehalten wird.
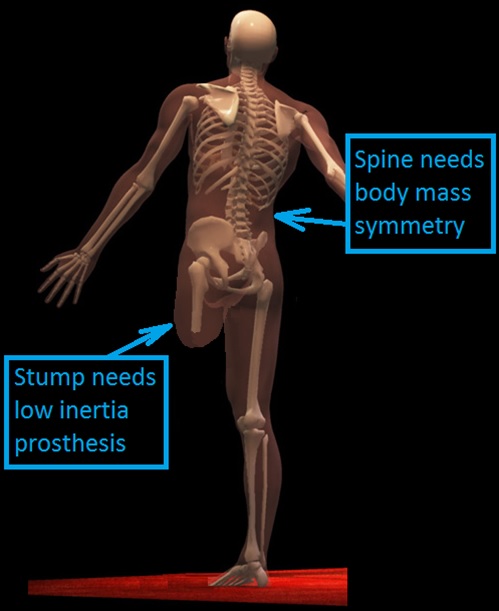
6.3.Gegensätzliche Anforderungen von Rückgrat und Stumpf
Hier ist zu beachten: Die Masse der Prothese, ganz besonders aber deren Trägheitseigenschaften, beeinflussen das Gehen in zwei gegensätzlichen Weisen, wie in Abb. 6.c gezeigt. Das Rückgrat und dessen Muskulatur verlangen eine Prothese, die sich wie die gegenüberliegende Gliedmaße anfühlt. Das bedingt Ähnlichkeiten in Masse, Dämpfung, Energieerzeugung und Absorption.
Der Stumpf muss aber die Prothese bewegen, und das schränkt die Kraft ein, die darauf einwirken kann. Im Gegensatz zum Rückgrat verlangt der Stumpf daher eine leichte Gliedmaße mit niedrigem Trägheitsmoment.
Es mag zwar widersprüchlich anmuten, doch ist es sinnvoll, hier zunächst von der „Perspektive des Hüftgelenks“ aus anzusetzen. Ein normales Bein fühlt sich beim Abheben der Fußspitze leicht an. (Das ist deshalb der Fall, weil die Wadenmuskeln die Schienbeinbewegung auslösen, ohne dass dabei die Hüftmuskeln wesentlich zur Überwindung der Trägheit in Anspruch genommen werden.) Dagegen bremsen vor dem Fersenauftritt die kräftigen Gesäßmuskeln die nach vorwärts gerichtete Kraft im Bein ab, wobei sie der vollen in der Gliedmaße wirkenden Trägheit entgegenwirken. Anwendern von Prothesen steht die zum Abheben der Ferse in den Wadenmuskeln innewohnende Kraft nicht mehr zur Verfügung. Ihre Hüfte muss deshalb beide Funktionen übernehmen, worauf die scheinbar widersprüchlichen Anforderungen zurückzuführen sind.
Für S-TF-Amputierte hat also ein niedriges Trägheitsmoment einen überragenden Stellenwert. Für eine Prothese bedeutet ein niedriges Trägheitsmoment ein verbessertes Verhältnis zwischen Stumpf- und Gliedposition. Die Reaktionskräfte werden nämlich damit verringert, und die passive Weichteilverformung vor dem Hintergrund des unvermeidlichen Nachgebens von Gewebe werden reduziert.
Ein gesteigertes propriozeptives Bewusstsein trägt dabei zu Sicherheit und Wohlbefinden bei.
6.4.Massenträgheit am konkreten Beispiel
Die Prothese wird hier in ihrer aus Fuß, Knie und Schaft bestehenden Zusammensetzung betrachtet. Adapter und Rohre bleiben hier der Kürze halber unberücksichtigt. Jeder dieser Komponenten ist eine bestimmte Anordnung zugewiesen.
Zur Bewegung aller Elemente durch den gesamten Beinschwung muss Kraft aufgewandt werden, wobei Methoden zur schätzweisen Bewertung dieser Kräfte bereitstehen. Damit kann ein Verständnis der Einflüsse der verschiedenen Teile der Prothese auf das Gesamterlebnis im Gebrauch der Prothese in Bezug auf die Stumpflänge erreicht werden.
Die folgende Betrachtung stützt sich auf Theorien aus der Mechanik. Dabei wird davon ausgegangen, dass zur Bewegung eines Festkörpers mit der Masse m um eine Distanz d zu einem Punkt eine Kraft (streng genommen ein Moment) M erforderlich ist. Für die dabei bestehende Beziehung gilt M = m ·d2. Das entspricht jener Situation, die dann vorliegt, wenn das Hüftgelenk eine um (=d) entfernt befindliche Prothese (=m) durch eine Schwungphase (= um einen Punkt, z. B. die Hüfte) bewegt. Es lohnt sich hier, die nachstehenden einfachen Berechnungen durchzugehen. Damit können dann die anteiligen Beiträge von Fuß, Knie und Schaft verstanden werden. Abb. 6.d zeigt zwei Darstellungen einer Prothese. In der linken Darstellung ist die Masse des Kniegelenks an ihrem herkömmlichen Ort angeordnet. Die Darstellung rechts zeigt die auf dem letzten Stand der Technik gegebene proximale Anordnung der Masse des Kniegelenks, nämlich über der Knieachse.
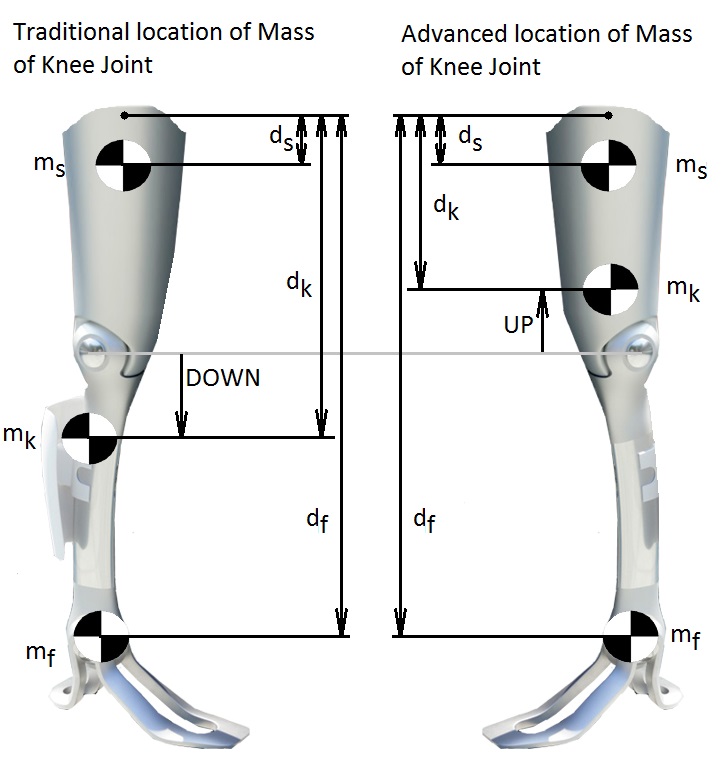
Mithilfe einiger einfacher, auf geschätzten Werten basierender Berechnungen kann ein Verständnis über die Auswirkungen einer Verschiebung des Massenschwerpunkts mkdes Kniegelenks erreicht werden. (Die Zahlenwerte sind für die Zwecke des ausgearbeiteten Beispiels gewählt, wobei bestimmte nachrangige und wenig maßgebliche Rotationseffekte nicht einbezogen sind.)
Der Fuß mit einer geschätzten Masse mf von 600 g kann nur in einer festgesetzten, benutzerspezifischen Entfernung df =90 cm vom Hüftgelenk entfernt (mit dem Tochanter major als Bezugsort) angeordnet werden, damit der vollen Gliedmaßenlänge Rechnung getragen wird. Es besteht hier hinsichtlich der Anordnung keine andere Wahlmöglichkeit. Die Distanz dieser Masse trägt zum Trägheitsmoment der Prothese proportional zum Quadrat ihrer Masse bei. In verfeinerter Form zeigt diese Theorie auch die in der Schwungbewegung des Fußes auftretende Verzögerung, die einen glatteren Verlauf der Beschleunigung und eine geringfügige Verringerung des Trägheitseffekts bewirkt. Wie auch immer dieser Trägheitseffekt beschaffen ist, so handelt es sich dabei bei jedem besseren Kniegelenk um einen relativ festgesetztenWert in Bezug auf die jeweilige Gehgeschwindigkeit. Über die Verringerung der Fuß- und Schuhmasse hinaus lässt sich hinsichtlich des Fußabstands zur Senkung des Trägheitsmoments des Fußes nur wenig ändern. Die Annahme für das Trägheitsmoment des Fußes von 50% * 0,6 * 0,922 = 0,27* kg m 2, wobei der angenommene Wert von 50% der glatter verlaufenden Beschleunigung entspricht, ist durch die doppelte Pendelbewegung gegeben.
Der Schaft mit einer angenommenen Masse ms von 1000 g umfasst den Stumpf; aus der Nähe der Hüfte zum Stumpf (ds = 10 cm) resultiert ein extrem niedriger Wert für das Trägheitsmoment. Für den Schaft kann ein Trägheitsmoment von 1 kg . 0,1 m 2 = 0,01 kg m 2 angenommen werden.
Das Kniepassteil mit einer angenommenen Masse von 1350 g kann herkömmlicherweise mit einem Hüftabstand von (beispielsweise) 46 cm angeordnet werden, was einem geschätzten Trägheitsmoment für ein herkömmliches Knie von 1,35 kg * 0,46 m 2 = 0,28 kg m2 entspricht. Herkömmlich bedeutet in diesem Fall „distal zum Kniemittelpunkt“. Ein VGK-S mit einer angenommenen Masse von 1000 g kann äquivalent mit einem Abstand von 34 cm von der Hüfte angeordnet werden, was einem angenommenen Trägheitsmoment von dann nur noch 1 kg * 0,34 m 2 = 0,12 kg m 2 entspricht. Wir erreichen damit eine Reduzierung auf weniger als die Hälfte!
| (Trochanter major als Bezugspunkt verwenden) | Herkömmliche Prothese | VGK-S-Prothese |
| Fuß | 0,19 | 0,19 |
| Knie | 0,28 | 0,12 |
| Schaft | 0,01 | 0,01 |
| Gesamt | 0,48 | 0,32 -> Einsparung von 40 % |
Auch wenn diese Zahlen nur beispielhafte Ansätze darstellen, so liegt hier doch ein überzeugender Beweis dafür vor, dass die Verbesserung durch die sich „leichter“ anfühlende Prothese, über die praktisch alle Prothesenträger des VGK-S berichten, auf klaren technischen Grundlagen beruht!
6.5.Kraftwirkung auf die Haut
Wenn Trägheitskräfte Hautdislokationen verursachen (wie die Ausbauchungen in Abb. 6.e zeigen), ist die Beziehung zwischen Krafteinwirkung und Deformierung in hohem Maße nichtlinear. Eine derartige Beziehung lässt sich aufgrund von Versuchsergebnissen darstellen.
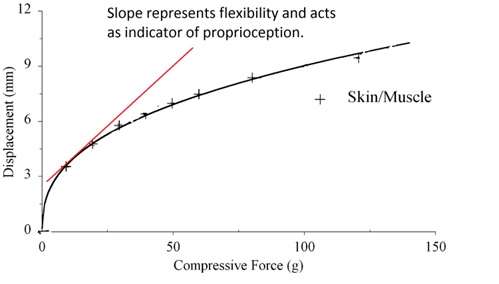
Eine Studie zum Nachgeben von über Muskel- und Fettgewebe liegender Haut bei Ratten (siehe dazu auch die entsprechende Abbildung) zeigt, dass sich bei geringer Krafteinwirkung die Hautdislokation disproportional zur einwirkenden Kraft verhält, während bei höheren Kräften die Hautdislokation sich unterproportional dazu erhöht.
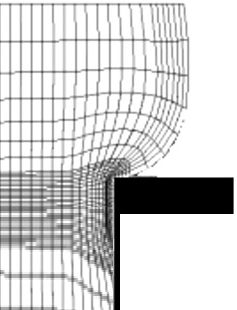
Das „deformierte Gitternetz“ des Finite-Elemente-Modells in Abb. 6.g veranschaulicht die Hautspannung im Schaftrandbereich (schwarz).
Innerhalb der Haut befinden sich, wie oben gezeigt, Ruffini-Endkörperchen, die kollagene Nervenbündel enthalten und Berührung, Hautdehnung, Richtung und Krafteinwirkung registrieren. „Das im Bindegewebe der Dermis befindliche Ruffini-Körperchen ist ein relativ großer spindelförmiger Rezeptor und ist in die Kollagenmatrix eingebunden. In dieser Hinsicht ist es dem Golgi-Sehnenorgan im Muskel ähnlich. Durch seine Verbindung mit dem Bindegewebe reagiert es gezielt auf Hautdehnung.“.
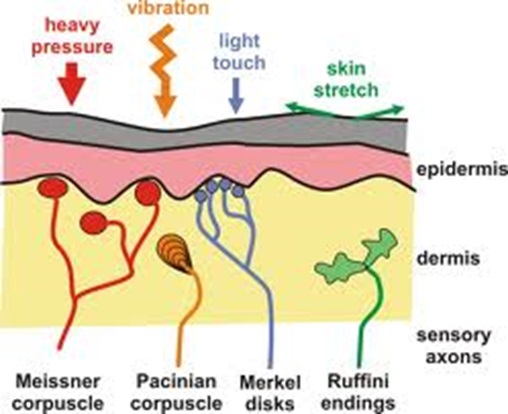
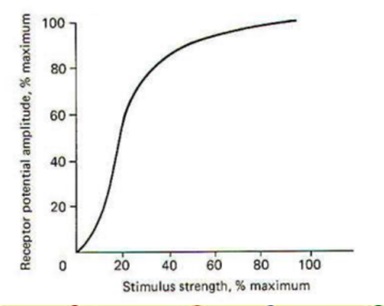
Die Reizantwort auf mechanische Reaktionen lässt sich wie in vorstehender Abbildung darstellen. Hier zeigt sich, dass die deutlichste Unterscheidung in den Nervenzellen im niedrigen Stimulationsbereich erfolgt: Wo die Kurve am steilsten verläuft, ist die Änderung im Rezeptorpotenzial (=Nervenendenreaktion)bei minimaler Veränderung der Reizstärke (=zusätzliche Hautdehnung) am größten. Wenn diese Erkenntnis mit den bereits aus der Betrachtung der Hautverformung im Vergleich mit Krafteinwirkung zusammen genutzt wird, stellt sich heraus, dass die beste Fähigkeit zur Wahrnehmung dann gegeben ist, wenn die Hautverformung nahezu neutral ist und die einwirkenden Kräfte niedrig sind. Wenn dagegen hohe Kräfte einwirken, die Haut gespannt ist und weiterer Verformung widersteht, verflacht sich die Reizantwort ebenfalls.
Das alles weist darauf hin, dass mit einem reduzierten Trägheitsmoment die Prothese ein besseres propriozeptives Bewusstsein fördert. Damit wird nämlich das Ausmaß der Gewebeverformung im Schwungablauf und gerade dann vermindert, wenn die Trägheit die dominierende Größe bildet. Das verbessert dann die Beziehung zwischen der Nervenreaktion und der Hautspannung, was die Empfindung von „Richtung und Kraftanwendung“ erhöht. Logik und Erfahrung zeigen, dass also das propriozeptive Bewusstsein gesteigert wird.
Für SF-TF-Amputierte bedeutet das, dass ein niedriges Trägheitsmoment objektive medizinische Auswirkungen hat. Es bringt also nicht bloß möglicherweise wahrgenommene und begrenzte Nutzenfaktoren wie beispielsweise einen„subjektiv“ verbesserten Komfort mit sich.
6.6.Propriozeption und Hautreiz
Das Femur wird durch die Muskeln im Bereich des Hüftgelenks bewegt. Die Versorgung mit Nervenfasern in den Gelenkkapseln wie auch Muskelfasern und Haut am Amputationsstumpf vermitteln propriozeptives Feedback (Propriozeption bedeutet die räumliche Wahrnehmung von Körperteilen).
Nach erfolgtem Anlegen eines Schafts befindet sich die Haut in relativ festem Kontakt mit dem Schaft (außer wenn es dabei zu einem Reiben oder Aneinandergleiten kommt). Die knapp außerhalb des Schafts befindliche Haut muss sich dabei aber mehr als normal strecken, um eine Schaftbewegung zum Becken hin zu gestatten. Natürlich bewegt sich dabei der Schaft nicht genau in derselben Weise wie das Femur. Der Hautdehnung wird nämlich Widerstand entgegengesetzt, und das weiche Nachgeben der Muskeln und von Fettgewebe zwischen der Schaftwand und dem Femur trägt ebenfalls dazu bei. Bei geringen Bewegungen und niedriger Einschränkung der Schaftbewegung ist die Kopplung zwischen Femur und Schaft gut. Wenn aber der Schaft in seiner Bewegung gehemmt wird – wenn also das Femur sich bewegt, der Schaft aber dieser Bewegung nicht folgt, so ist die Kopplung zwischen Femur und Schaft nur mangelhaft.
Während sich die Prothese in der Schwungphase befindet, dämmt das Trägheitsmoment dynamisch die Schaftbewegung ein, was die Kopplung zwischen Femur und Schaft verschlechtert. Daraus lässt sich logischerweise folgern, dass ein niedrigeres Trägheitsmoment die Kopplung zwischen Femur und Schaft verbessert.
Das Gehirn ist imstande, mithilfe von physischen Objekten, die mit dem Körper verbunden sind oder gehalten werden, etwas als entfernt zu „verspüren“. Das gilt nicht nur für den Gebrauch von Besteck, Gehstöcken, Schaufeln und anderen Gegenständen, sondern gleichermaßen auch für Schäfte und Prothesen. Wie nachstehend betrachtet wird, hängt die Fähigkeit zu distanzentsprechender Wahrnehmung mithilfe von Objekten (wie etwa dem Schaft und der Prothese als Ganzes) von den daran beteiligten Kräften ab.
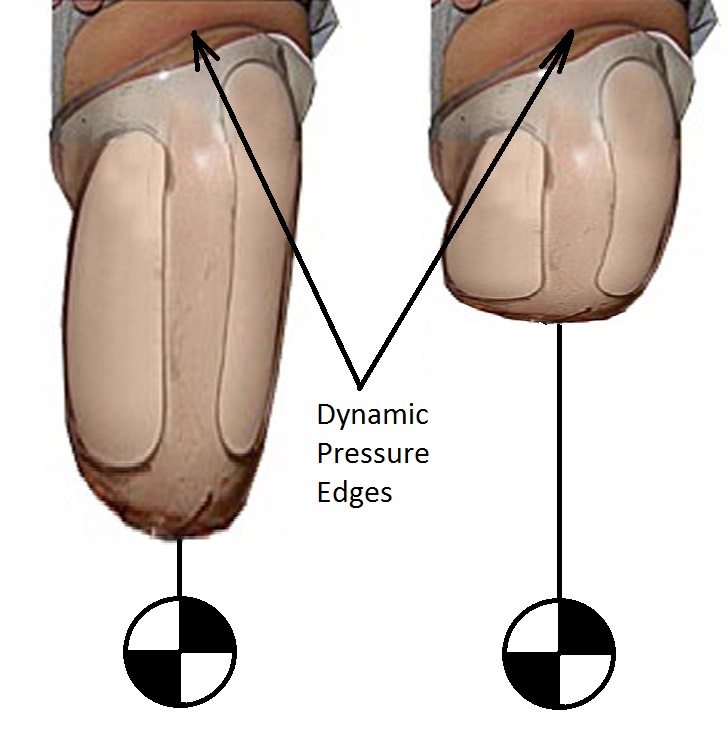
Abb. 6e zeigt die Ausbauchung von Weichteilen am Schaftrand. Wenn am Schaft eine Masse “hängt”, die einem Trägheitsverhalten unterliegt, dann verhält sich der Belastungsrand dynamisch:
Je kürzer der Stumpf, desto stärker und dynamischer verhalten sich diese Belastungsränder, wobei sie die Propriozeption der Prothese vermindern.
6.7.Die umfasste Femurlänge
Moderne Schaftformen versuchen, die pseudarthrotischen Bewegungen zwischen Stumpf und Prothesenschaft zu reduzieren. Trotzdem verbleibt ein gewisses „Spiel“ des Femurs im Schaft. Die Prothese folgt einer Bewegung des Femurs nur mehr oder weniger präzise. Dies hat direkte Auswirkungen auf die propriozeptive Wahrnehmung der Prothese und damit auf das Gefühl der “Sicherheit”.
Die Fähigkeit des Stumpfes, die Prothese präzise zu führen, hängt dabei wesentlich von zwei Parametern ab:
- Massenverteilung der Prothese:
Ein höherer Schwerpunkt bei gleichem Gewicht kann die auf den Stumpf einwirkenden Kräfte erheblich reduzieren. Hier hilft das VGK-S mit seinem gegenüber herkömmlichen Kniepassteilen wesentlich proximaleren Massenschwerpunkt. - Femur-Schaft Schnittstelle:
Für die Übertragung der Bewegung des Femurs auf den Prothesenschaft spielt natürlich die noch verfügbare Femurlänge eine Rolle, aber auch die Qualität der Schaftanpassung. Um ein Maß für die Kraftverhältnisse an der Femur-Schaft-Schnittstelle zu erhalten, sprechen wir daher im Folgenden von der umfassten Femurlänge. Abb. 6j verdeutlicht, wie sich die Schaftform auf die umfasste Femurlänge auswirken kann.
Daneben wird auch deutlich, wie nachteilig ein großer Schaftdurchmesser im Verhältnis zur umfassten Femurlänge sein kann.
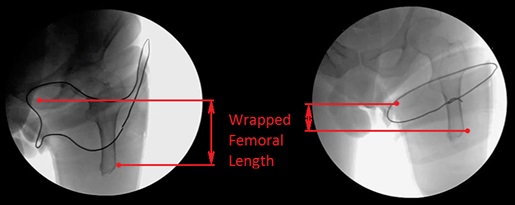
Grundsätzlich gilt: Die Reaktionskräfte, die zum “Spiel” des Femurs im Schaft und damit zu einer verminderten Kraftübertragung vom Femur auf die Prothese führen, verhalten sich umgekehrt proportional zur umfassten Femurlänge. Abb. 6j zeigt rechts eine umfasste Femurlänge von nur 6 cm, während links immerhin 12 cm erreicht werden können. Daher reduzieren sich die nachteiligen Reaktionskräfte bei der doppelten umfassten Femurlänge auf nur noch die Hälfte. Die Prothese lässt sich entsprechend besser führen.
7.Stolpern
7.1.Bewegungsablauf in der Stolpersituation

Stolpern ergibt sich durch eine momentartig in der Schwungphase auftretende Unterbrechung. In der allgemeinen Wahrnehmung besteht darüber nur ein unzulängliches Verständnis. Für die Amputiertenversorgung ist es jedoch hilfreich, dieses Vorkommnis näher zu betrachten.
Chamila Chorata u. a. legen eine eingehende Studie zum über das Stolpern „Transfemoral amputee recovery strategies following trips to their sound and prosthesis sides throughout swing phase“ (Korrekturstrategien von Oberschenkelamputierten im Gefolge von Stolperereignissen an der gesunden Seite wie auch Prothesenseite im gesamten Ablauf der Schwungphase) vor. Wir zitieren: „ Aus diesen Ergebnissen lässt sich ableiten, dass bei einem von der Prothese ausgehenden Stolpern aller Wahrscheinlichkeit nach versucht wird, die Reaktionen von Nichtbehinderten nachzuahmen. Solche Reaktionen beinhalten das Potenzial für einen besseren Ersatz der verlorenen Gliedmaße, die keine Ausgleichsbewegungen erforderlich macht. Andererseits zeigen unsere Ergebnisse, dass es auch wichtig ist, adäquate Reaktionen zu implementieren, wenn die Prothese das Stützglied bildet, da dessen Fähigkeit zur Koordination mit dem gestolperten Bein einen großen Einfluss darauf hat, wie Stolpernde ihr Gleichgewicht wiedergewinnen.“ Die Verfasser stellen auch einen hervorragenden Film zur Verfügung, in dem unterschiedliche Korrekturstrategien veranschaulicht werden.
Ein Stolpern tritt dann ein, wenn der prothetische Fuß im Ablauf der Schwungstreckung auf dem Boden aufprallt. Der prothetische Fuß kann dann nicht mehr weiter durchschwingen, wobei aber das vorwärts gerichtete Körpermoment nicht sofort unterbunden werden kann. Dieser Vorgang wird in der obenstehenden Abb. 7a (A) in emotional betonter Weise dargestellt, wobei ein Polizist durch plötzliches Aufhalten seines Fußes zu Fall gebracht wird. Diese Skulptur gibt aber keine realistische Darstellung dafür, sondern sie reflektiert einen weithin verbreiteten Eindruck eines stolpernden oder zu Fall gebrachten Menschen.
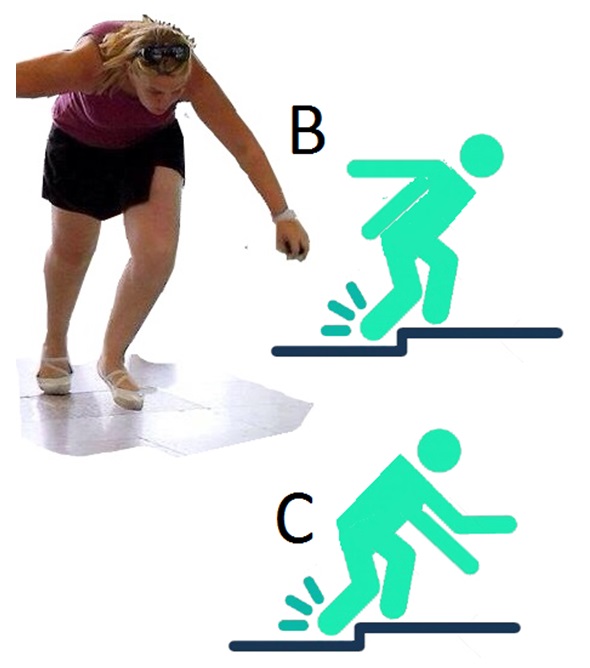
Das vorwärtsgerichtete Moment des Fußes und des Schienbeins wirkt einesteils durch eine Aufprallkraft auf den Boden und andernteils durch deren Weiterleitung im Schaft auf den Amputationsstumpf ein. Der Realität besser entsprechende Bewegungen sind in Abb. 7b (B) karikiert. Die Arme der stolpernden Frau sind augenscheinlich zurückgezogen, damit das Moment auf ihr linkes, nach vorne geschobenes Bein weitergegeben wird. Die Situation in 7b (C) bildet eine Endphase ab. Wenn nämlich der stolpernden Person bewusst wird, dass das Stolpern nicht mehr aufzuhalten ist, streckt sie zum Schutz des Kopfes und zum Auffangen des Falls die Arme aus.
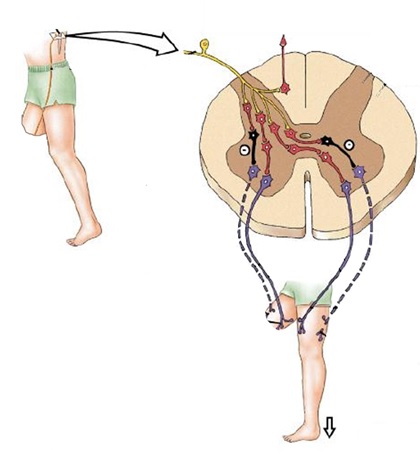
7.2.Der gekreuzte Streckreflex
Was passiert eigentlich genau in einer Stolpersituation? Hier kommt Körperreflex ins Spiel, der unbewusst und automatisch (durch das Rückenmark gesteuert) abläuft. Es handelt sich um den sog. „gekreuzten Streckreflex“. Dieser Abschnitt liefert eine Reihe von Überlegungen dazu, wie bestimmte Strategien zur Stolperkorrektur erklärt werden können. Sie dienen auch als Basis für konstruktive Gesichtspunkte des VGK-S.
Amputierte müssen berücksichtigen, dass die das Stolpern auslösende Prothese keinen Kniestreckreflex bewirken kann. Hier trägt ein Kniegelenk mit Default Stance normalerweise bedeutend zur Sicherheit von Amputierten bei: Das Knie stellt nämlich einen Widerstand bereit, der so hoch ist, als stünde dabei ein Kniestreckreflex zur Verfügung.
Wenn wir jedoch eine Stolperkorrektur wie in Abb. 7b beobachten, setzt augenscheinlich ein Verhaltensmuster ein, das wie ein gekreuzter Streckfreflex abläuft, dazu aber den Default Stance des VGK-Go nutzt!. Ein ähnliches Verhaltensmuster mit einem Anheben der Arme kann in diesem Fall anhand der Stolperkorrekturunterstützung im VGK-S gesehen werden.
Die Bodenbedingungen waren eher schlecht, wie beim Gehen durch langes Gras. Auf die Unterbrechung des Vorwärtsschwunges des Fußes konnte ein Sturz aber vermieden werden, was vor dem Abspielen des Films vom Anwender selbst angegeben wurde. Es scheint also, dass hier das Rückenmark die Unterbrechung der beabsichtigten Bewegung erkannt hatte. Durch eine reflexartige Streckung der Hüfte drückte diese auf die Prothese hinab, wobei der hohe Widerstandsmodus ausgelöst wurde. Die Arme wurden dabei zurückgezogen, woraufhin das kontralaterale Glied nach vorne in die Stolperkorrekturstrategie gebracht wurde.

Bei einem Stolperereignis lässt sich eine ähnliche Anreihung von Körperstellungen verfolgen bei:
– Personen mit zwei normalen Beinen;
– Amputierten mit einem Kniegelenk mit Default Stance;
– Amputierten mit dem VGK-S.
Daraus kann abgeleitet werden, dass hier ein gekreuzter Streckreflex ausgelöst wird, da der zur Vornahme der entsprechenden Bewegungen bereitstehende Zeitraum einfach zu kurz ist. Jede versuchte Stolperkorrektur ist mit auf den eigenen Schutz bezogen Reflexhandlungen verbunden: Ausstrecken der Hand, wie in Abb. 7d zu sehen, gehört dazu.
Weiterführende Literatur:
Schillings u.a,. „Muscular Responses and Movement Strategies During Stumbling Over Obstacle“ (Muskuläre Reaktionen und Bewegungsstrategien beim Stolpern über Hindernisse).
Stevenson u.a., „Interlimb communication following unexpected changes in treadmill velocity during human walking“ (Wechselweise Gliedmaßenkommunikation bei unerwarteten Geschwindigkeitsveränderungen beim Gehen auf Laufbändern).
7.3.Stolperschutz beim VGK-S
Der im vorherigen Abschnitt geschilderte Körperreflex bildet die Grundlage für den Stolperschutz- bzw. Korrekturmechanismus des VGK-S. Die reflexartig ablaufende Hüftstreckung bewirkt nämlich, dass das VGK-S augenblicklich in den Standphasenmodus umschaltet und damit der Beugung des Kniegelenks entgegenwirkt.
In Abb. 7e ist oben ein „Spalt“ zu sehen, der eine geringfügige Bewegung um die Q-Achse gestattet. Damit wird ein Ventil gesteuert, das den Schwungmodus blockieren kann. Wenn sich die Prothese im Schwungmodus befindet und nach vorne gebracht wird, ist die Spalte maximal breit, und das Schwungventil ist „geöffnet“.
Wenn nun Gewicht oder Hüftstreckung auf die Prothese einwirkt, drücken der Schaft und das Körpergewicht auf den Spalt, der sich dadurch schließt und damit den Schwungsmodus blockiert. Sobald die Gliedmaße durch Entlastung und Hüftbeugung abgehoben wird, öffnet sich der Spalt maximal und gestattet wieder den Gebrauch im Schwungmodus.
Die grundsätzliche Funktionsweise läuft folgendermaßen ab:
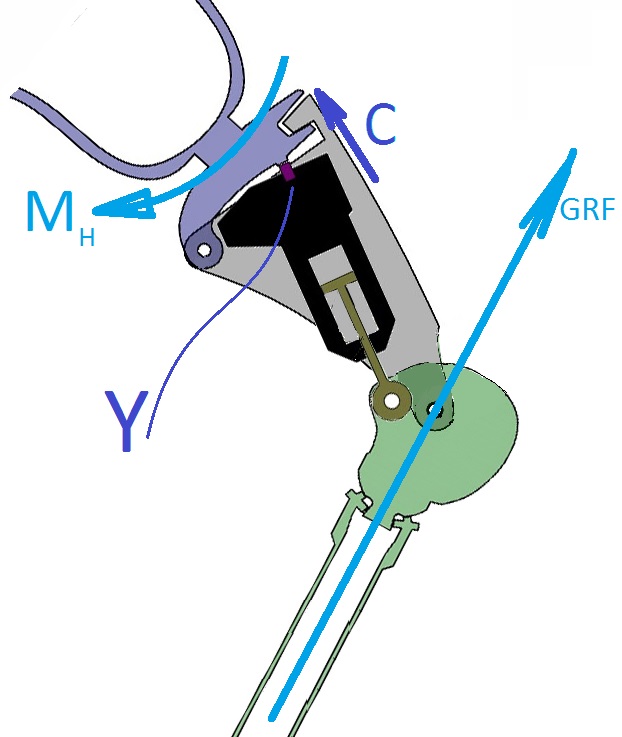
Wie in Abb. 7f dargestellt, setzt bei Streckung der Hüfte das Hüftstreckmoment MH ein. Die Fußbewegung ist dabei gehemmt und wirkt mit der Bodenreaktionskraft BRK zurück. Der Spalt schließt sich damit mit der in C gezeigten Schließbewegung und aktiviert die Yielding-Funktion Y, wodurch hoher Widerstand einsetzt. Dabei ist zu bemerken, dass mit dem Einsetzen des hohen Widerstands zur Beugung in Y der Schaft nun von der Q-Achse abkommt. Das führt zu einer Rückbewegung in C, wodurch der Yielding-Widerstand Y eigentlich wieder aussetzen sollte. Das geschieht aber deshalb nicht, weil ein interner Speicher den hohen Widerstandszustand aufrecht erhält, und zwar trotz der widerstandsauslösenden Bewegung C.
Durch das Zusammenwirken des Hüftstreckreflexes bei gleichzeitig unterbrochenem Schwung, wobei das VGK-S in den hohen Widerstandsmodus übergeht und der hohe Widerstandszustand durch interne Speicherung aufrecht erhalten bleibt, ist die Stolperkorrekturunterstützung Realität geworden.
8.Die Adaptive Fluidsteuerung
Bei VGK-S handelt es sich um ein gesteuertes Kniegelenk, das dynamisch reagiert und dabei den Flexionswiderstand augenblicklich und in Echtzeit der jeweiligen Situation anpassen kann.
Im Gegensatz zu herkömmlichen gesteuerten Kniegelenken wird hier keine elektronische Steuerung eingesetzt, sondern die sog. Adaptive Flusssteuerung. Diese nutzt im Prinzip die Strömungsenergie der Hydraulikfüssigkeit, um den Widerstand der Hydraulikeinheit zu kontrollieren.
Zur Steuerung werden dabei Informationen wie Kniewinkel, Geschwindigkeit und Temperatur erfasst und dazu genutzt, um ein dynamisches und situationsbezogenes Kniebeugeverhalten einzustellen. Dies wird durch Coanda-Effekte, irrotationale Wirbeldioden, bistabile Ventile und Bewegungsrückkopplungsschleifen erreicht.
Damit wird eine neuartige und einmalige Kombination eingesetzt. Bisher wurden bei gewichtsaktivierten Kniegelenken, ohne Rücksicht darauf, ob sie elektronisch gesteuert sind oder auch nicht, Kräftemuster eingesetzt, bei denen zur Bestimmung des Standes oder des Schwungs des Gelenks die Kräfte am Fuß ansetzen. Das VGK-S nutzt dagegen zur Steuerung des Stand- oder Schwungmodus von der Hüfte ausgehende Kräftemuster und kommt damit den natürlichen Vorbild wesentlich näher. Dabei erübrigt sich die Anwendung von Restgewicht am Vorfuß zur Ermöglichung der Schwungauslösung, doch kann ein solches Restgewicht durchaus mitwirken. Die Steuerung dieses neuartigen, hüftaktivierten Stands gestattet eine in hohem Maße vielfältige Benutzersteuerung. Dies gilt sogar für ermüdete Anwender, wobei selbst bei Stolperkorrekturen schnell auf von Spinalreflexen ausgelöste Hüftstreckung reagiert wird.
Der fluidische Informationsprozessor evaluiert kontinuierlich den fortschreitenden Verlauf der Schwungphase und reagiert sofort und in Echtzeit auf Veränderungen in der Schrittfrequenz.
Die Standphase wird ebenfalls fluidisch gesteuert, wobei eine hochgradig kontrollierte Knieflexionsrate bei Gewichtsbelastung (Yielding) sichergestellt wird, wie sie etwa beim Hinabgehen von Treppen und Gefällen auftreten.
9.Wie geht es weiter?
Vielen Dank, wenn Sie bis hierher “durchgehalten” haben. Die in diesem ersten Teil des Praxisleitfadens vermittelten Grundlagen bilden eine gute Basis. Der zweite Teil beschreibt Prothesenaufbau und Einstelloptionen. Bitte beachten Sie, dass die Beantwortung der Fragen zum Verständnistest aus Teil 3 und die anschließende Zuteilung einer Zertifizierungsnummer durch Orthomobility die Voraussetzung bilden für eine sichere Prothesenversorgung mit dem Very Good Knee – Short Transfemoral.
Weiter zum VGK-S Praxisleitfaden Teil 2…
